倒立摆是验证控制方法和理论的实验平台,倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案、
倒立摆最初研究开始于20世纪50年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备,而后人们又参照双足机器人控制问题研制二级倒立摆控制设备,从而提高了检验控制理论或方法的能力,也拓宽了控制理论或方法的检验范围。
三级倒立摆是由一、二级倒立摆演绎而来,它的实物系统控制实现已经是公认的难题。北京航空航天大学张明廉教授领导的课题组应用“拟人智能控制理论”,于1994年8月成功地实现单电机控制的三级倒立摆。这一成功,证实了“拟人智能控制理论”的正确性,并表明了在没有精确数学模型和不需要推理机的前提下,对一类复杂被控对象是可以控制的。三级倒立摆控制的成功,对空间运动体的控制有直接参考价值。
北师大模糊系统与模糊信息研究中心暨复杂系统智能控制实验室采用李洪兴教授提出的“变论域自适应模糊控制”理论,成功地实现了四级倒立摆控制仿真实验,并于2002年8月11日实现了全球首例四级倒立摆实物系统控制。而由此项理论产生的方法和技术将在半导体及精密仪器加工、机器人技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用前景。
各级倒立摆简介如下:
1、单级摆:结构相对简单,控制相对容易,控制算法比较简单。适合本科生实验教学。
2、二级摆:结构相对复杂,控制难度相对大,控制算法也相对复杂。可适合于研究生实验教学需要,也可以作为专业教师研究新型的控制算法之用。
3、三级摆--:结构复杂,控制难度大,控制算法复杂。主要适于理论研究、实验仿真之用。
4、四级摆:比三级倒立摆更复杂。主要适用于半导体及精密仪器加工、机器人技术、导弹拦截控制系统、航空器对接控制技术等方面。
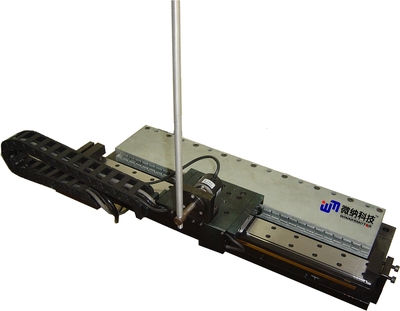
此前,实现的一级至四级倒立摆均为直线运动倒立摆。直线运动倒立摆实现的是在一个平面上的摆动,轨道较长、传动环节较多、占地空间较大,实践中常常由于传动机构的故障或误差,而不是控制方法本身的问题导致平衡控制失败。随着科学技术的发展,被控对象日趋复杂,对控制性能的要求也日趋提高,直线倒立摆已不能满足复杂系统的需要,由此产生了圆形轨道倒立摆。
圆形轨道倒立摆实现了上、下、左、右、前、后任何方向的摆动,与传统的直线轨道倒立摆相比,圆形轨道倒立摆具有控制精度高、功能多、结构紧凑、性价比高等优点,所以圆形轨道倒立摆比传统的直线轨道倒立摆更具有竞争力和应用价值。
圆形轨道倒立摆实物系统控制的实现要比直线运动倒立摆实物系统控制的实现困难得多;这不仅是因为这样的系统其变量、非线性程度及不稳定性成倍地增加,而且有关机械和电子器件的实现或选用会遇到瓶颈性的困难。因此,圆形轨道倒立摆实物系统是控制领域研究的重要课题之一。
倒立摆系统机理的研究不仅具有重要的理论价值,而且具有重要的现实意义,是控制理论中经久不衰的研究课题。长期以来,倒立摆系统的控制问题一直受到国内外学者的普遍关注和不懈探索。