陀螺仪(gyroscope)用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。应用学科:船舶工程(一级学科);船舶通信导航(二级学科)
陀螺仪_陀螺仪 -均衡陀
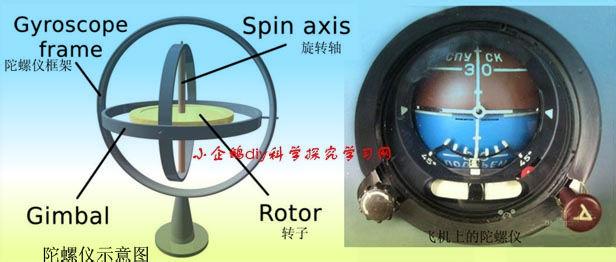
陀螺仪
当转子对自转轴的转动惯量为I,自转角速度为ω时,则转子的自转动量矩为L=Iω。假定支架轴承都绝对光滑,基座不能通过这些轴承把外力矩传给转子,且内、外两框环的质量可忽略不计。于是,由动量矩守恒可知,均衡陀螺仪的转子轴将能借惯性而在惯性空间保持不变方向。假如用某种方式给转子以冲击性外力矩,使动量矩L获得横向增量
且
则新动量矩矢将偏转一个小角
冲击还使转子轴的方向产生同一数量级的改变,但新的角速度方向已和新的动量矩方向不一致。冲击后,转子轴将紧靠新动量矩L+△L的方向作微幅高频的抖动(章动),其幅度与ω成反比,而频率则与ω成正比。由于ω很大,这种抖动实际上是不易察觉的,所以可认为冲击并未明显改变转子轴的方向,即高速自转均衡陀螺仪的转子轴具有抗冲击的能力,这种特性称为定轴性。但是,如果转子没有自转,那么任何微小冲击将使转子轴获得角速度,而此后将按这个方向无限制地偏离下去。
如果沿内环轴持久地施加外力矩M,由于存在自转动量矩L,转子不会沿M方向绕内环轴转动,而绕十字交叉轴(即外环轴)以某一角速度Ω持久地转动(旋进),如图2。由动量矩定理可以证明,旋进角速度Ω的大小反比于自转角速度ω的大小,即
式中θ为ω和Ω的交角。其次,由作用与反作用定律可知,转子对外力矩M的施加者有反作用力矩K=-M。这个力矩称为陀螺反抗力矩或陀螺力矩,其大小为:
K=ΩL sinθ=IωΩ sinθ=M,
方向与M相反。K是科里奥利(惯性)力的矩。陀螺仪转子还有其他惯性力矩。当旋进非匀速时,角加速度和转子对旋进轴的转动惯量的乘积冠以负号,称为单轴转动惯性力矩,它和陀螺力矩的大小属同一数量级。
图3 在外力矩作用下内外环的运动
陀螺运动的近似微分方程组 用A表示转子连同内、外环一起对外环轴的转动惯量,A表示转子连同内环对内环轴的转动惯量。α、β分别是外环和内环的转角,且β由两环相垂直的位置(标记为N)算起(图3),当外力矩引起的内、外环旋进角速度
都是小量,其平方项和乘积项都可忽略时,则各轴的外力矩(包括轴承中摩擦引起的力矩)和起决定性作用的惯性力矩可归纳如下表:
其他惯性力矩都是
的二阶或更高阶小项,因而都可以不计。
由达朗伯原理可以立即写出陀螺仪转子轴绕外环和内环旋进的近似微分方程组:
绕转子轴的自转角速度(ω+sinβ)由外力矩维持不变。
式(2)可以看成转子-内环纽合体相对于外环的转动方程。如果外环不转,即
则
就是按牛顿定律形式直接写出的转动方程。现在由于环转动而增加了修正项
此陀螺力矩对转子的相对运动有表观作用。可以看出,在此相对运动中,陀螺力矩有使自转轴按最短途径向旋进轴转动的趋势。
式(1)中也出现了陀螺力矩
这个力矩是转子给予内环的惯性反抗,因此,对于转子-内环-外环的组合来说,就和外力矩一样(惯性力不服从作用反作用定律,转子本身不因这个陀螺力矩而又受到反作用)(见动静法)。
方程(1)和(2)也可以应用于二自由度陀螺仪,如二自由度陀螺仪是由外环固定后构成的,则在方程组中应
从而式(2)就和转子无自转时的单轴转动微分方程一样-式(1)可用来确定外力矩M,它等于陀螺力矩
上述近似理论足以解释高速自转陀螺仪的全部动力学特性。地球作为一个陀螺,它的姿态摄动也可以由此得到说明(见刚体定点转动解法)。
原理
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫做陀螺仪。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
在现实生活中,陀螺仪发生的进给运动是在重力力矩的作用下发生的。
特性
陀螺仪被广泛用于航空、航天和航海领域。这是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是进动性(precession),这两种特性都是建立在角动量守恒的原则下。
定轴性
当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:
陀螺仪
1.转子的转动惯量愈大,稳定性愈好;
2.转子角速度愈大,稳定性愈好。
所谓的“转动惯量”,是描述刚体在转动中的惯性大小的物理量。当以相同的力矩分别作用于两个绕定轴转动的不同刚体时,它们所获得的角速度一般是不一样的,转动惯量大的刚体所获得的角速度小,也就是保持原有转动状态的惯性大;反之,转动惯量小的刚体所获得的角速度大,也就是保持原有转动状态的惯性小。
进动性
当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直。这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。如右图。
进动方向
这可用右手定则判定。即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝外力矩的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为进动角速度ω=M/H。
进动性的大小也有三个影响的因素:
1.外界作用力愈大,其进动角速度也愈大;
2.转子的转动惯量愈大,进动角速度愈小;
3.转子的角速度愈大,进动角速度愈小。
陀螺仪_陀螺仪 -现代仪器
简介
太空魔法陀螺仪 小号
现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。1976年 等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
组成
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。
陀螺仪内容的拓展
基于C8051F005单片机的机载陀螺仪测试系统
基于PC104的陀螺仪动态测试系统设计
陀螺仪_陀螺仪 -用途
陀螺仪构造
陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感元件,即可作为信号传感器。根据需要,陀螺仪器能提供准确的方位、水平、位置、速度和加速度等信号,以便驾驶员或用自动导航仪来控制飞机、舰船或航天飞机等航行体按一定的航线飞行,而在导弹、卫星运载器或空间探测火箭等航行体的制导中,则直接利用这些信号完成航行体的姿态控制和轨道控制。作为稳定器,陀螺仪器能使列车在单轨上行驶,能减小船舶在风浪中的摇摆,能使安装在飞机或卫星上的照相机相对地面稳定等等。作为精密测试仪器,陀螺仪器能够为地面设施、矿山隧道、地下铁路、石油钻探以及导弹发射井等提供准确的方位基准。由此可见,陀螺仪器的应用范围是相当广泛的,它在现代化的国防建设和国民经济建设中均占重要的地位。
广泛使用的MEMS陀螺(微机械)可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。并且MEMS陀螺相比传统的陀螺有明显的优势:
1.体积小、重量轻。适合于对安装空间和重量要求苛刻的场合,例如弹载测量等。
2.低成本。
3.高可靠性。内部无转动部件,全固态装置,抗大过载冲击,工作寿命长。
4.低功耗。
5.大量程。适于高转速大g值的场合。
6.易于数字化、智能化。可数字输出,温度补偿,零位校正等。
陀螺仪_陀螺仪 -工作原理
陀螺工作站的原理
高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
陀螺工作站的构造
陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。此陀螺装置与全站仪结合而成。陀螺本体在装置内用丝线吊起使旋转轴处于水平。当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。
追尾测定[反转法]
利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。在震动方向反转的点上(此时运动停止)读取水平角。如此继续测定之,求得其平均震动的中心角。用此方法进行20分钟的观测可以求得+/-0。5分的真北方向。
时间测定[通过法]
用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。用全站仪的水平微动螺丝对指针的摆动进行追尾,当指针通过0点时反复记录水平角,可以提高时间测定的精度,并以+/-20秒的精度求得真北方向。
应用实例
3.1 隧道中心线测量
在隧道等挖掘工程中,坑内的中心线测量一般采用难以保证精度的长距离导线。特别是进行盾构挖掘(shield tunnel)的情况,从立坑的短基准中心线出发必须有很高的测角精度和移站精度,测量中还要经常进行地面和地下的对应检查,以确保测量的精度。特别是在密集的城市地区,不可能进行过多的检测作业而遇到困难。如果使用陀螺经纬仪可以得到绝对高精度的方位基准,而且可减少耗费很高的检测作业(检查点最少),是一种效率很高的中心线测量方法。
3.2 通视障碍时的方向角获取
当有通视障碍,不能从已知点取得方向角时,可以采用天文测量或陀螺经纬仪测量的方法获取方向角(根据建设省测量规范)。与天文测量比较,陀螺经纬仪测量的方法有很多优越性:对天气的依赖少、云的多少无关、无须复杂的天文计算、在现场可以得到任意测线的方向角而容易计算闭合差。
3.3 日影计算所需的真北测定
在城市或近郊地区对高层建筑有日照或日影条件的高度限制。在建筑申请时,要附加日影图。此日影图是指,在冬至的真太阳时的8点到16点为基准,进行为了计算、图面绘制所需要的高精度真北方向测定。使用陀螺经纬仪测量可以获得不受天气、时间影响的真北测量。
4,陀螺仪的各种品牌及购买途径
美国ADI公司 TI公司 ST公司 俄罗斯 Fizoptika 挪威SENSONOR公司 日本Silicon美国BEI村田 EPSON
美国CrossbowKVH国内的一些高校和研究所也在研发生产一些陀螺仪,国内的一些公司和北京中发电子市场3176代理某些陀螺仪。
陀螺仪在智能手机上的应用
1、陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。还可以实现GPS的惯性导航:当汽车行驶到隧道或城市高大建筑物附近,没有GPS讯号时,可以通过陀螺仪来测量汽车的偏航或直线运动位移,从而继续导航。
2、可以和手机上的摄像头配合使用,比如防抖,在拍照时的维持图像的稳定,防止由于手的抖动对拍照质量的影响。在按下快门时,记录手的抖动动作,将手的抖动反馈给图像处理器,可以让手机捕捉到更清晰稳定的画面。
3、各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。有关这点,想必用过任天堂WII的网友会有很深的感受。
4、可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。通过小幅度的倾斜,偏转手机,实现菜单,目录的选择和操作的执行。(比如前后倾斜手机,实现通讯录条目的上下滚动;左右倾斜手机,实现浏览页面的左右移动或者页面的放大或缩小。)
5、也是未来最有前景和应用范围的用途。那就是可以帮助手机实现很多增强现实的功能。增强现实是近期才冒出的概念,和虚拟现实一样,是计算机的一种应用。大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有跟深入的了解。如果大家不理解,举个例子,前面有一个大楼,用手机摄像头对准它,马上就可以在屏幕上得到这座大楼的相关参数,比如楼的高度,宽度,海拔,如果连接到数据库,甚至可以得到这座大厦的物主、建设时间、现在的用途、可容纳的人数等等。



