现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。
激光陀螺_激光陀螺仪 -分类
一般把陀螺仪分为激光陀螺、光纤陀螺、微机械陀螺和压电陀螺,这些都是属于电子式的,可跟GPS、磁阻芯片以及加速度计一起制造成为惯性导航控制系统 。
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。
也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,这样就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。
从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。
自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。1976年等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
激光陀螺_激光陀螺仪 -激光陀螺
原理
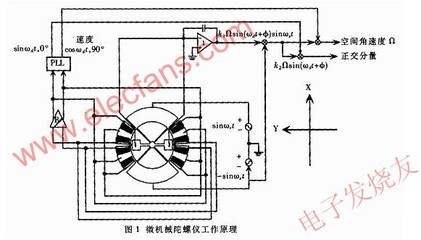
激光陀螺仪的原理是利用光程差来测量旋转角速度( Sagnac 效应)。在闭合光路中,由同一光源发出的沿顺时针方向和反时针方向传输的两束光和光干涉,利用检测相位差或干涉条纹的变化,就可以测出闭合光路旋转角速度。激光陀螺仪的基本元件是环形激光器,环形激光器由三角形或正方形的石英制成的闭合光路组成,内有一个或几个装有混合气体(氦氖气体)的管子,两个不透明的反射镜和一个半透明镜。用高频电源或直流电源激发混合气体,产生单色激光。为维持回路谐振,回路的周长应为光波波长的整数倍。用半透明镜将激光导出回路,经反射镜使两束相反传输的激光干涉,通过光电探测器和电路输入与输出角度成比例的数字信号。
环形激光陀螺仪原理
通过右边的 示意图更加容易理解。
激光陀螺仪的结构
激光陀螺仪的光环路实际上是一种光学振荡器,按光腔形状分有三角形陀螺和正方形陀螺,腔体结构有组件式和整体式两种,一般三角型激光陀螺用的最多。典型的激光陀螺的结构是这样的:它的底座是一块低膨胀系数的三角形陶瓷玻璃,在其上加工出等边三角形的光腔,陀螺仪就由这样闭合的三角形光腔组成,三角形的边长安装在每个角上的输出反射镜,控制反射镜和偏量反射镜限定,在三角形的一条边上安装充以低压氦氖混合气体的等离子管。

激光陀螺仪需要突破的主要技原理术为漂移、噪声和闭锁阈值。
激光陀螺仪的特点
激光陀螺仪没有旋转的转子部件,没有角动量,也不需要方向环框架,框架伺服机构,旋转轴承,导电环及力矩器和角度传感器等活动部件,结构简单,工作寿命长,维修方便,可靠性高,激光陀螺仪的平均无故障工作时间已达到九万小时以上。
激光陀螺仪的动态范围很宽,测得速率为±1500度每秒,最小敏感角速度小于±0.001度每小时一下,分辨率为/弧度秒数量级,用固有的数字增量输出载体的角度和角速度信息,无需精密的模数转换器,很容易转换成数字形式,方便与计算机接口,适合捷联式系统使用。
激光陀螺仪的工作温度范围很宽(从-55℃~