原理图如下:
局部图(1):
局部图(2):
局部图(3):
代码如下:
#include<reg51.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit ST=P2^0; //启动转换位
sbit OE=P2^2; //输出允许位
sbit ALE=P2^3; //地址允许锁存位
sbit EOC=P2^1; //转换结束位
sbit CLK=P2^4; //时钟
long int datas,bai,she,ge;
uchar duan;
uchar codenum[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//不带点的数字
uchar codenum_dot[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed};//带点的数字
uchar codewei[]={0x0d,0x0b,0x07};//位码
void delay(uint z)
{
uchar i;
while(z--)
for(i=0;i<120;i++);
}
void display()
{
uchar i=0;
bai=(datas*500/255)/100;//计算并得到最高位
she=(datas*500/255)/10 % 10;//计算并得到中间位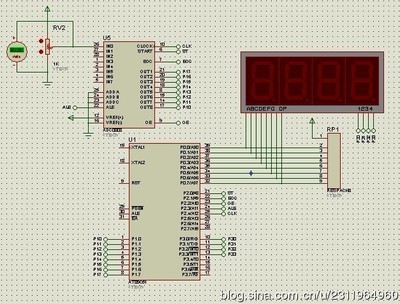
ge=(datas*500/255) % 10;//计算并得到最低位
for(i=0;i<3;i++)
{
P3=wei[i];
if(i==0){duan=num_dot[bai];}
elseif(i==1){duan=num[she];}
elseif(i==2){duan=num[ge];}
P0=duan;
delay(2);
}
}
void main()
{
TMOD=0x02;//定义T0,工作方式2
TH0=0x216;//TH0初值
TL0=0x216;//TH1初值
EA=1;//打开总中断
ET0=1;//打开TO中断允许位
TR0=1;//打开T0
while(1)
{
ST=OE=0;//将START和EO先置0
ALE=1;//将ALE和ST置1拉高电平
ST=1;
ALE=0;//将ALE和START置0开始数据变换
ST=0;
while(!EOC);//等待EOC,ECO为1表示转换完成
OE=1;//打开OE,读取数据
datas=P1;//将数据保存在datas
display();
}
}
void inter_1() interrupt 1
{
CLK=~CLK;
}
运行结果如下